Исследователи обучают домашних роботов в симуляциях на основе сканирования iPhone
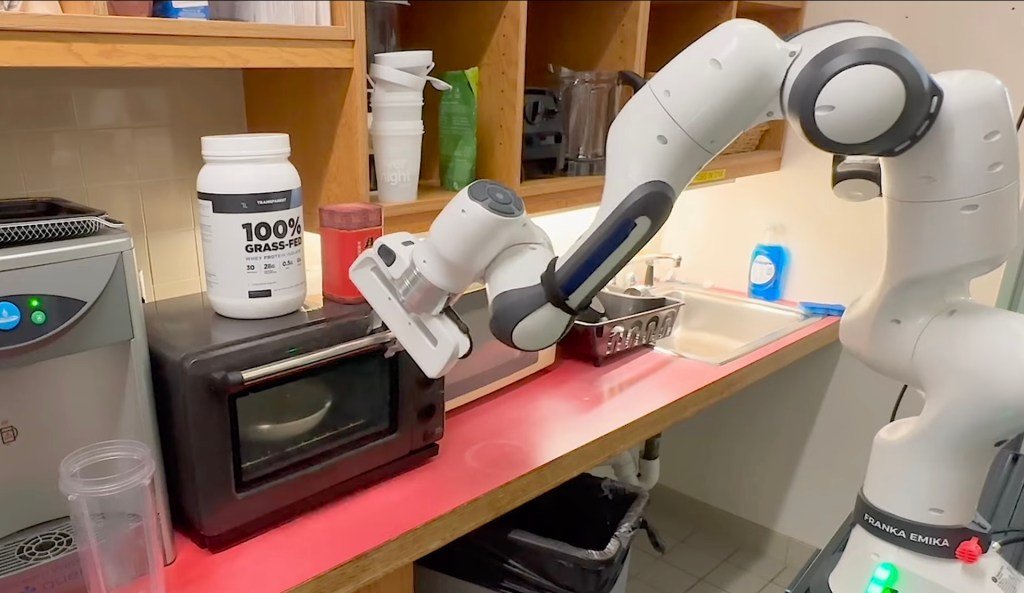
Существует множество причин, по которым вы не видите много невакуумных роботов в доме. Во главе списка - проблема неструктурированных и полуструктурированных сред. Ни один дом не похож на другой, от планировки до освещения до поверхностей до людей и домашних животных. Даже если роботу удается эффективно создать карту каждого дома, пространства всегда находятся в движении.
На протяжении последних десятилетий симуляция стала основой обучения роботов. Она позволяет роботам пробовать и ошибаться в задачах тысячи - или даже миллионы - раз за то же время, которое потребовалось бы сделать это один раз в реальном мире.
Следствия неудач в симуляции также значительно ниже, чем в реальной жизни. Представьте себе на минуту, что для того, чтобы научить робота класть кружку в посудомоечную машину, ему потребовалось бы разбить 100 реальных кружек в процессе.
“Обучение в виртуальном мире в симуляции очень мощное, потому что робот может практиковаться миллионы и миллионы раз,” - говорит исследователь Пулкит Агравал в видеоролике, связанном с исследованием. “Он мог разбить тысячу тарелок, но это не имеет значения, потому что все происходило в виртуальном мире.”
Тем не менее, так же как сами роботы, симуляция может пойти только до определенных пределов, когда дело касается динамических сред, таких как дом. Создание базы данных сред, подобных этим, в конечном итоге делает систему более приспособленной, когда что-то неизбежно выходит из строя, будь то перемещение мебели или оставление тарелки на кухонном столе.